检测周期3-5个工作日
价格面议
服务时间全天
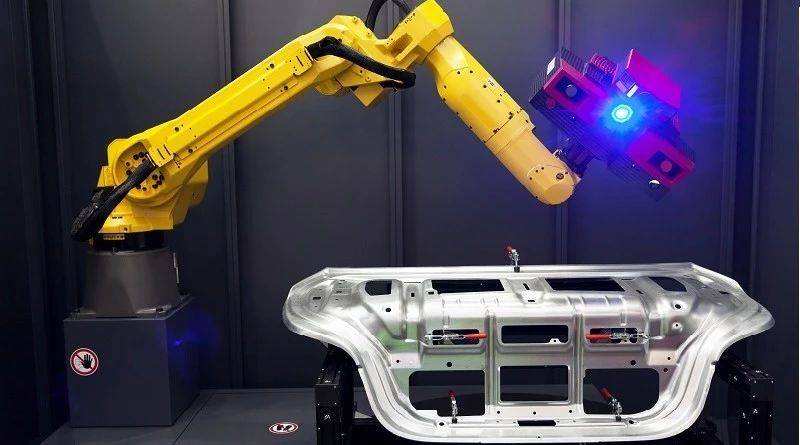
检测对象机器人 机床
是否出具报告是
四川纳卡检测服务有限公司授权成都国威冠准检测技术有限公司在网络推广平台上为其进行检验检测业务推广。成都国威冠准检测技术有限公司所发信息中的检验检测由四川纳卡检测服务有限公司检验检测,报告由四川纳卡检测服务有限公司出具。
机床检测是什么
传统的精度误差测量方式分辨能力很低,系统误差的客观存在不仅直接影响
到机床的加精度,同时也使得其它因素在精度的测量过程影响到测量的准确
度。现代的机床精度检测则采用**精密的检测设备,通过具有高分辨率的双频激
光F涉仪来实现对机床的精密测量。这种高精度的T涉仪,能够从系统本身、测
量方式以及环境条件等方面出发,通过对误差来源的分析,采用实现有效的补偿
手段来完成检测工作。要想有效实现机床精度的检测,先要设计出具体的测量
方案,再进行误差分析的设计,通过误差的软件补偿技术来实现检测精度的
提升。
机器人检测的要求是什么?
一、考虑固定和移动两种情况 ,给出工业机器人和服务机器人噪声测试方法
标准规定了机器人辐射噪声声功率级的测定方法。同时,给出了测试环境、测试仪器、被测试设备运行条件的要求,以及表面声压级及声功率级的计算方法。
本标准适用于各种用途的工业机器人、个人家用服务机器人及公共服务机器人(以下个人/家用服务机器人及公共服务机器人在本标准中合称为"服务机器人”) 噪声声功率级的测定。不适用于特种机器人噪声功率级
的测试。
标准对工业机器人、服务机器人移动式和非移动式测试基准体给出了具体描述。
二、明确机器人噪音测试运行工况
1、工业机器人测试时的运行工况要求如下:
a)额定负载;
b)以大加速度加速至额定速度(在运动周期内各轴应达到额定速度,无须同时) ;
c)各轴各关节在软限位80%的范围内同时做往复运动;
d)各轴应正常运行至少2小时后进行测试。
2、服务机器人测试时的运行工况要求如下:
a)正常工作状态(语音功能关闭) ;
b)当有负载要求时,应在额定负载的状态下进行测试;
c)应正常运行至少3分钟后进行测试。
3、其它要求:
当使用模拟工作条件时,被测机器人声源应处于正常使用且辐射声功率大的状态。
测试报告中应详细描述测试过程中声源的工作条件。

数控机床的精度是什么
数控机床的几何精度反映机床的关键机械零部件(如床身、溜板、立柱、主轴箱等)的几何形状误差及其组装后的几何形状误差,包括工作台面的平面度、各坐标方向上移动的相互垂直度、工作台面X、Y坐标方向上移动的平行度、主轴孔的径向圆跳动、主轴轴向的窜动、主轴箱沿z坐标轴心线方向移动时的主轴线平行度、主轴在z轴坐标方向移动的'直线度和主轴回转轴心线对工作台面的垂直度等。
常用检测工具有精密水平尺、精密方箱、千分表或测微表、直角仪、平尺、高精度主轴芯棒及千分表杆磁力座等

机器人的检测项目有哪些?
1.守护接地试验:根据GB/T5226.1的要求执行;
2.绝缘电阻试验:根据GB/T5226.1的要求执行;
3.介电强度试验:根据GB/T5226.1的要求执行;
4.事件气温下限试验:将气温降至0℃,至少坚持30min后通电运行4钟头,应能正常事件;
5.贮存气温下限试验:将气温降至-40℃,至少坚持4后,贮存4钟头,应能正常事件;
6.事件气温限试验:将气温升至40℃,至少坚持30min后通电运行4钟头,应能正常事件;
7.贮存气温限试验:将气温升至55℃,存放4钟头,4钟头后降至正常大气条件,并在此条件下复原4钟头,检查外貌辐射业务标准的要求,之后通电运行,应能正常事件。
8.事件条件下恒定湿热试验:将气温调至40℃,至少坚持30min,并在1钟头内使湿度达到80%,试验时间为48钟头,在此期间通电运行,应能正常事件。
9.贮存条件下恒定湿热试验:将气温调至40℃,湿度93%,存放天,在大气条件下复原12钟头,检查外貌应符合业务标准要求,之后通电运行,应能正常事件。
10.振动试验:初始和***后响应检查、定频耐久试验、扫频耐久试验、***后振动响应检查。
11.电磁兼容试验:静电、射频电磁场辐射抗扰度试验、电急速瞬变脉冲群、雷击浪涌冲击试验、传导抗扰度试验、工频磁场试验、电压暂降试验、传导扰、辐射扰试验,依据根据GB17799标准进行;

机器人检测有哪些?
1.功能试验:包括按钮、展现、联锁,各轴动作、指令动作等;
2.试验:接地电阻和守护接地、绝缘电阻、介电强度等;
3.环境条件试验:气温限试验、气温下限试验、恒定湿热试验、振动试验;
4.动力源试验:功率、压力波动、温升等;
5.运输性能:在马路上实际运输200km;
6.可靠性:可靠性验证试验方法由业务标准来规定。
机器人检测的背景技术:
在机器人的研发、制造上,尤其是工业机器人,我国与工业发达的差距较大,主
要表现在关键零部件基础薄弱、可靠性和精度不高。
重复定位精度作为机器人的一项重要的技术参数,其测量是机器人出厂前的必检项目
之一。
目前,测量机器人重复定位精度检测设备主要有激光跟踪仪和三坐标测量仪。其中,
激光跟踪仪测量实施过程简单、测量精度高,但是设备昂贵, 不是大部分中小企业所
负担得起的。另外,测量过程中,激光需要一-直跟踪机器人末端的靶球 ,机器人运动
速度不能很高,否则*出现断光。而三坐标测量仪测量实施过程中,机器人与三坐
标测量仪之间需要进行动作协调,否则*造成干涉,损坏测量仪,操作比较繁琐,
设备也比较昂贵。
http://jzjcjs.cn.b2b168.com








